
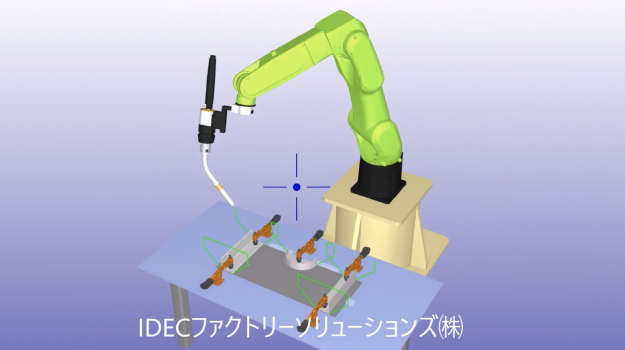

Fanuc CR-7iA / L
Welding application with a welding torch
Welding application with the RoboDK curve follow project function using the small collaborative robot "Fanuc CR-7iA / L" as a model. The RoboDK Online Library also supports some such weld torches.
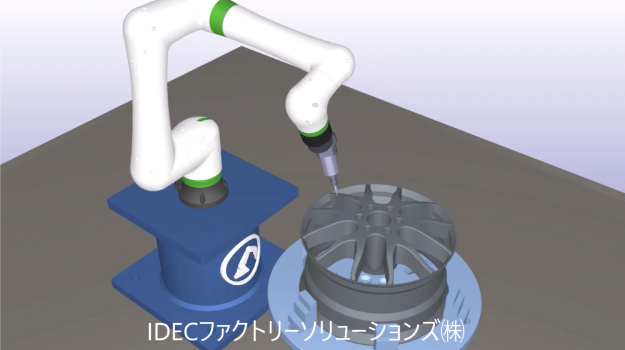
Fanuc CRX-10iA
Tire wheel deburring processing project
A spindle drill is attached to the Fanuc CRX-10iA to simulate deburring of tire wheels. Using RoboDK's Curve Follow Project makes it very easy to generate paths for deburring.
Yaskawa Motoman HC10
Cutting application
A cutting application in which a spindle is attached to the Yaskawa collaborative robot "Motoman HC10". RoboDK's plug-in feature allows you to generate paths from CAM data and quickly set up robotic machining projects.
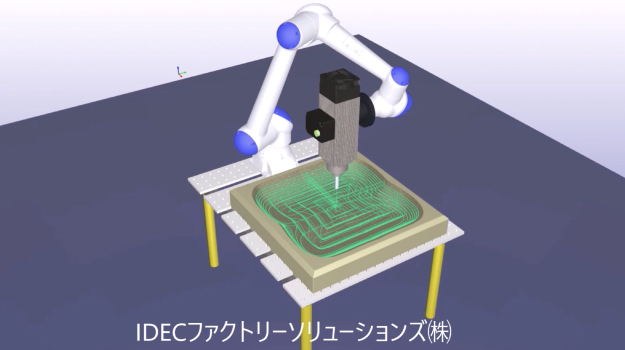
Collaborative robot Jaka Zu7
3D printing by robot using an extruder
An extrusion tool (Extruder) is attached to the collaborative robot JAKA Zu 7 to simulate 3D printing.This is a time-consuming project, usually requiring plots of millions of points and trajectories, but RoboDK's curve-following capabilities make it more efficient.
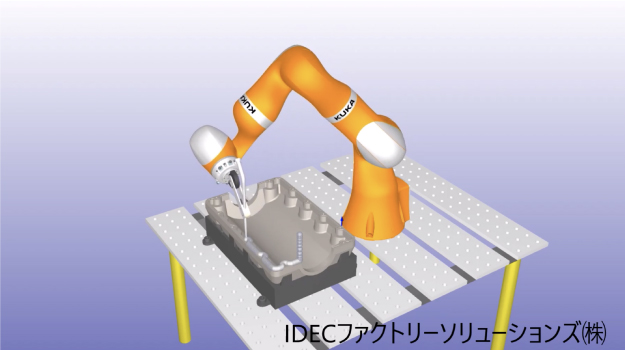
KUKA LBR iiwa
Sealant application application to automobile parts
This is a simulation of attaching a sealant dispenser (applying dispenser) to the 7-axis collaborative robot "KUKA LBR iiwa 7" and applying the sealant to car parts. With RoboDK, you can easily get path data by using the CAD plug-in function that works together.
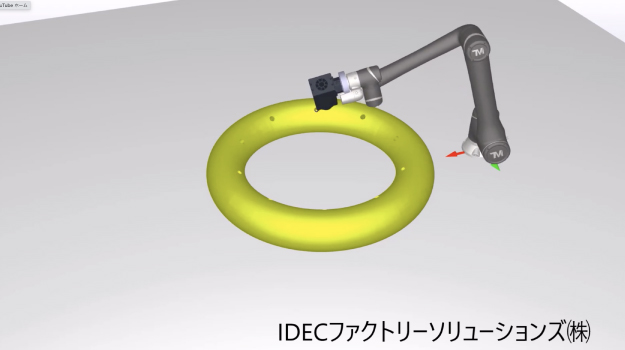
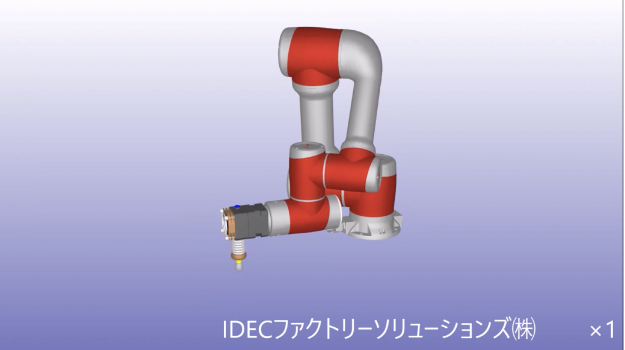
Omron TM Robot
Drilling application with spindle drill
A spindle drill is attached to the cooperative robot "Omron TM12" to simulate the work of drilling holes in circular parts.
RoboDK's Point Follow project allows you to extract each point from an object or curve, or import it as a list of CSV files.It is a function that can be used not only for drilling but also for spot welding.
UR10 / Robotiq Hand-E
Machine tending application for multi-tasking machines
This is a collaborative robot system with dual Robotiq Hand E mounted on the universal robot UR10.We are doing machine tending to multi-tasking machines.The multi-tasking machine can be created as an external shaft mechanism.